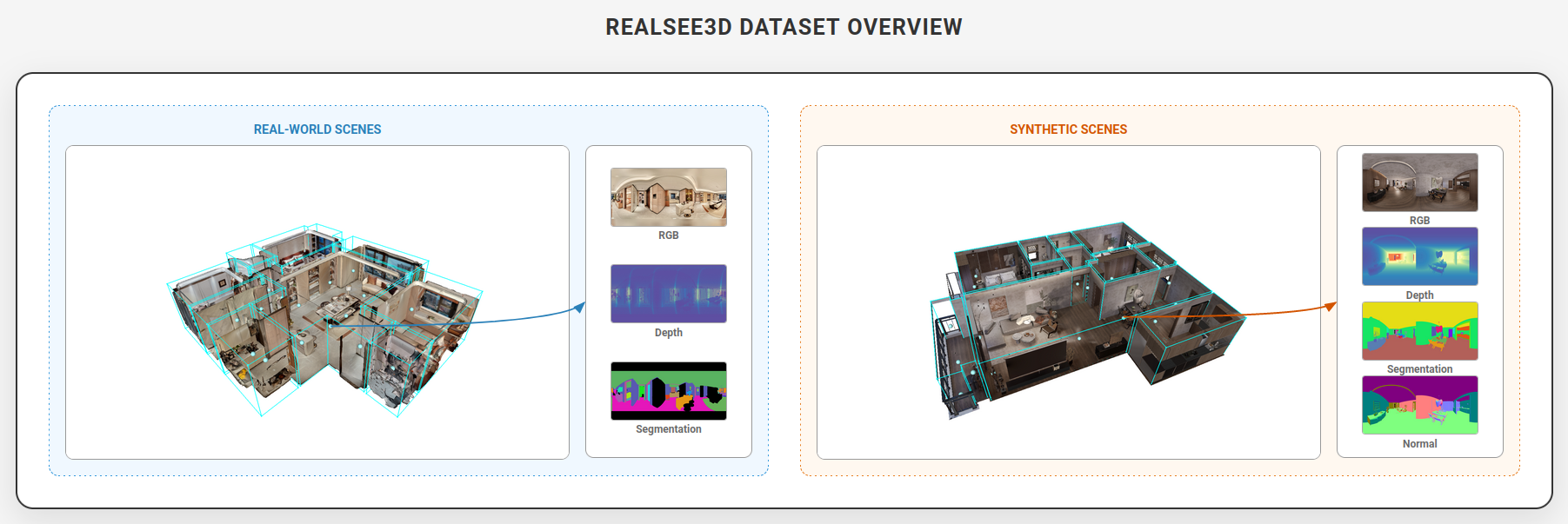
Overview
10,000 ScenesRealsee3D is a large-scale multi-view RGB-D dataset designed to advance research in indoor 3D perception, reconstruction, and scene understanding. It contains 10,000 complete indoor scenes, composed of:
1,000
Real-World Scenes
Captured by Galois-P4 LiDAR
9,000
Synthetic Scenes
Procedurally generated from real floorplans
95,962
Total Rooms
Real-world (9,483) + Synthetic (86,479)
299,073
Total Viewpoints
Real-world (24,263) + Synthetic (274,810)
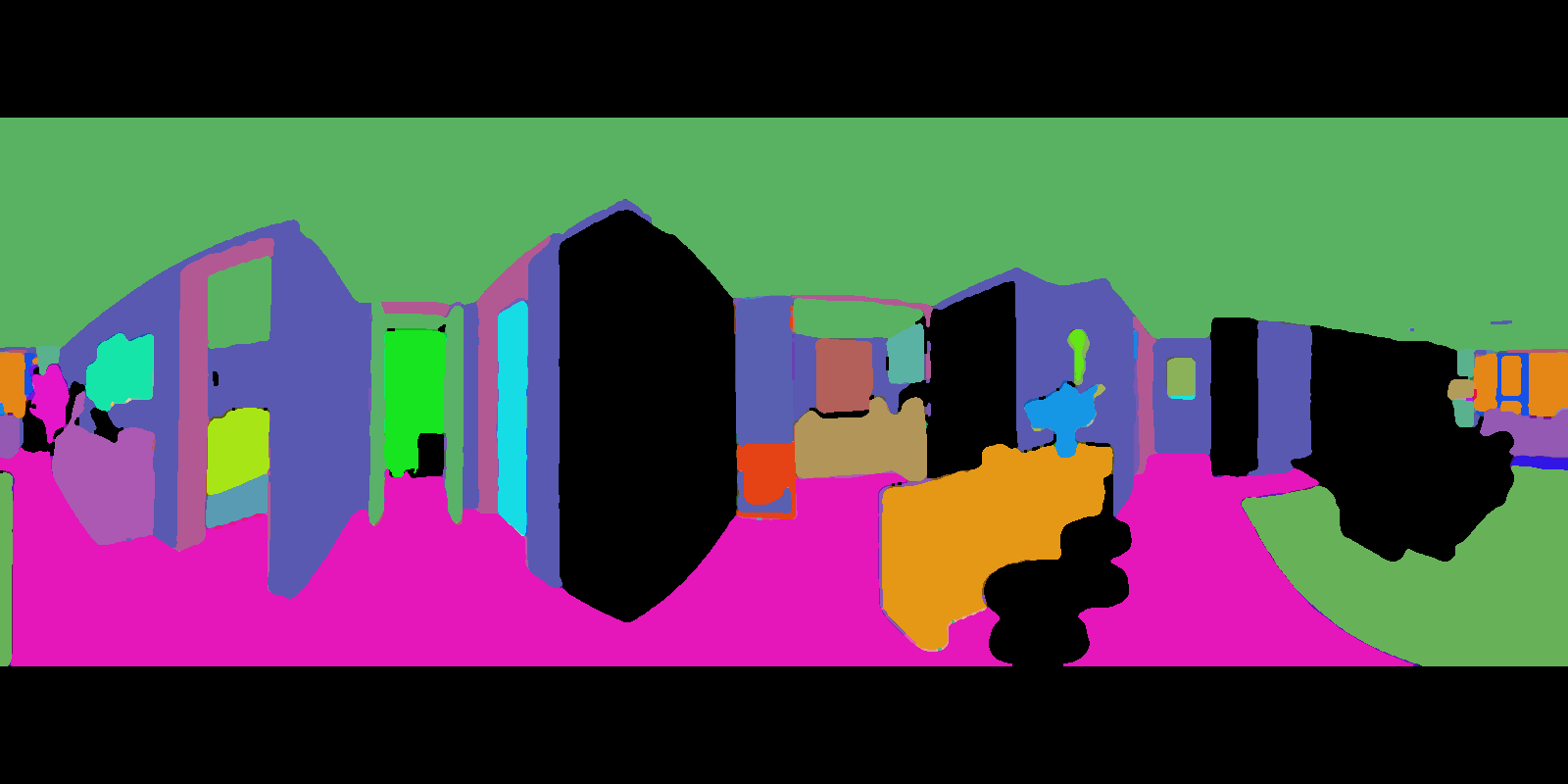
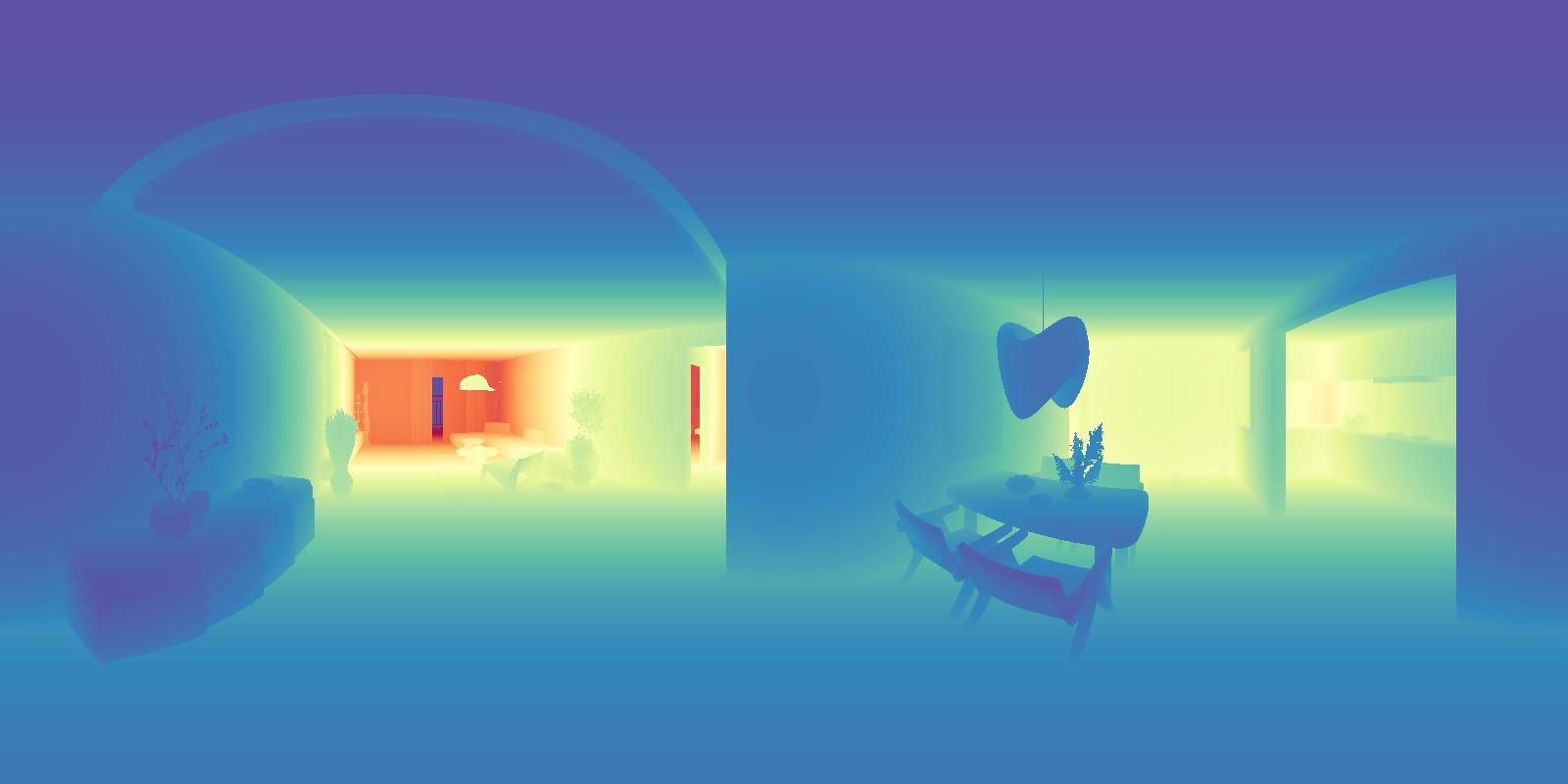
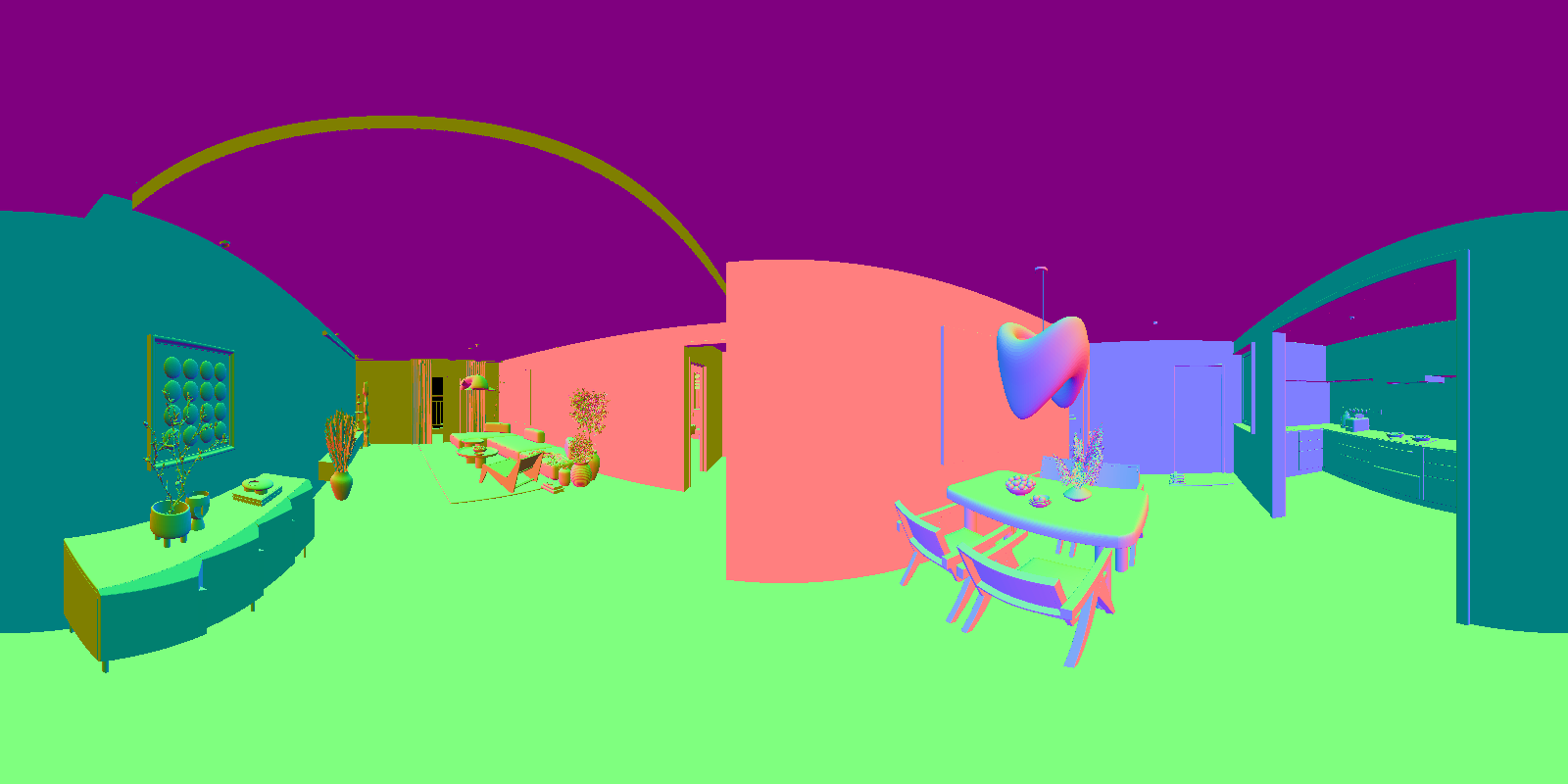
Realsee3D aims to serve as a unified benchmark for high-fidelity indoor scene modeling, facilitating research in geometry reconstruction, multimodal learning, and embodied AI.
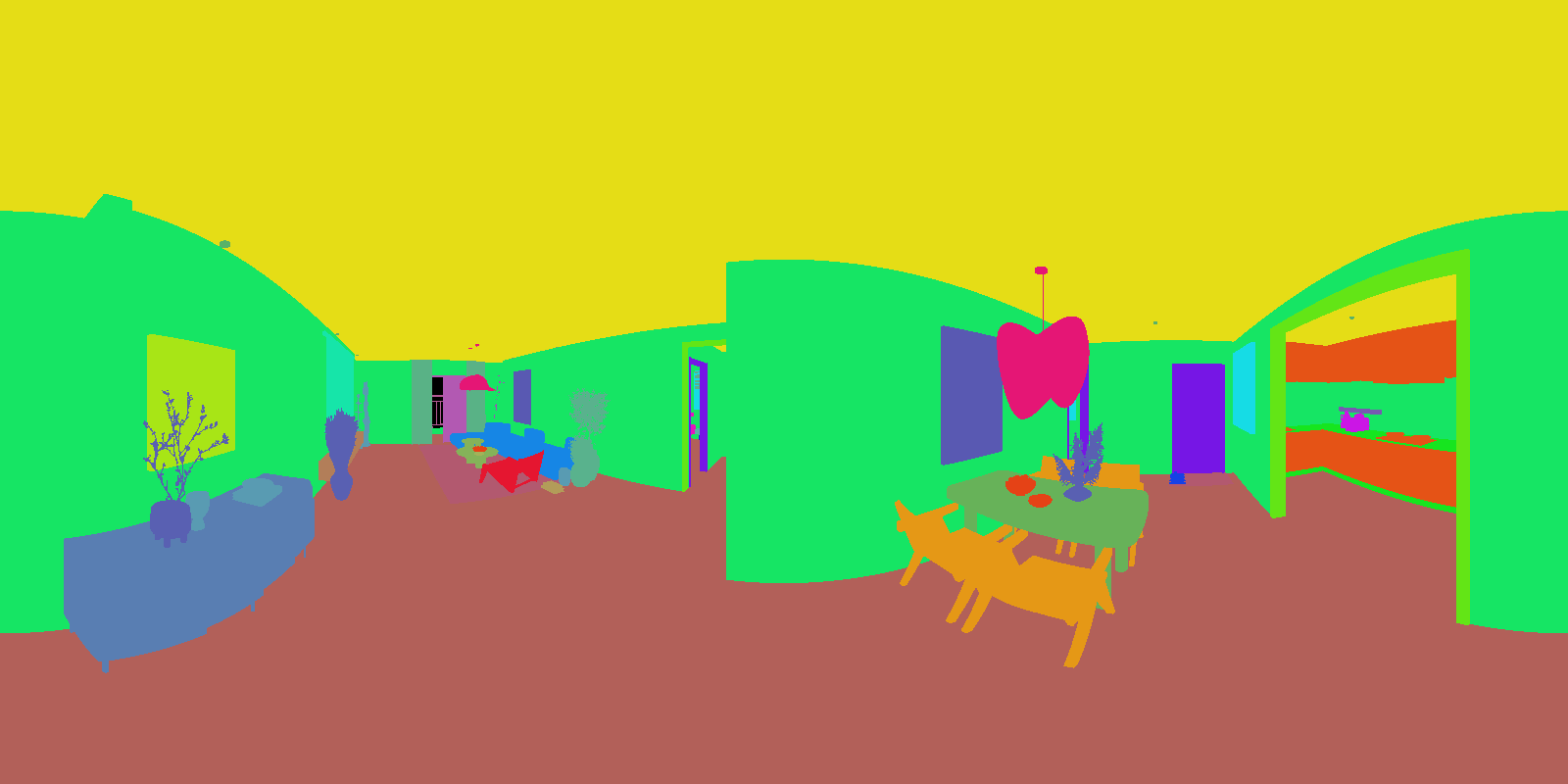
Beyond RGB-D imagery, the dataset provides comprehensive annotations, including CAD drawings, floorplans, semantic segmentation labels, and 3D object detection information.